- 产品介绍
- 详细参数
- 相关资源
NHP Kinarm精确地模拟了我们的人类骨骼(上肢),提供了从NHP到人类的基础研究范式;基础研究(NHP或人类)到临床的研究范式一在药物/治疗开发中尤为重要。
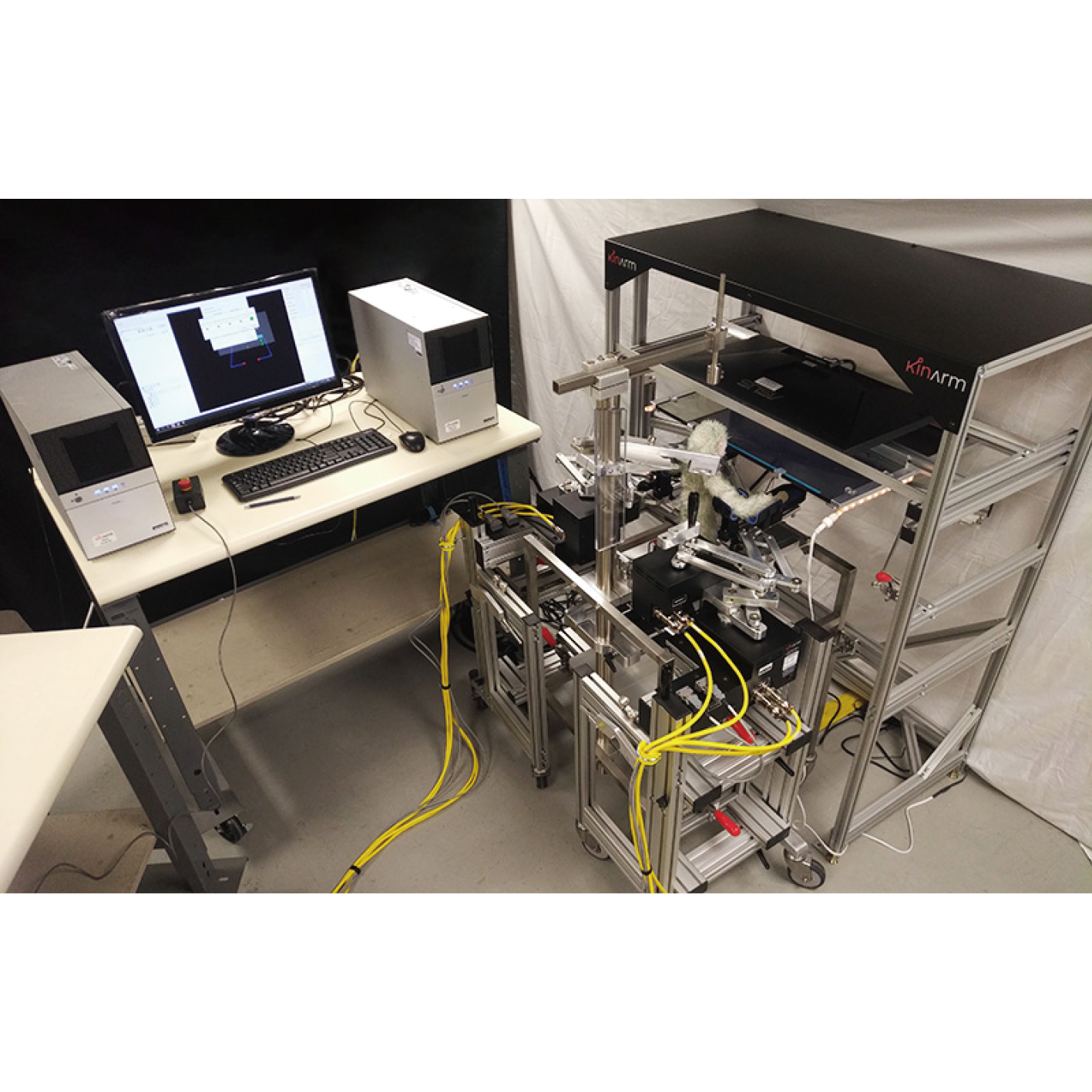
· 一个或两个电动Kinarm外骨骼机器人手臂:用于右手或左手研究;
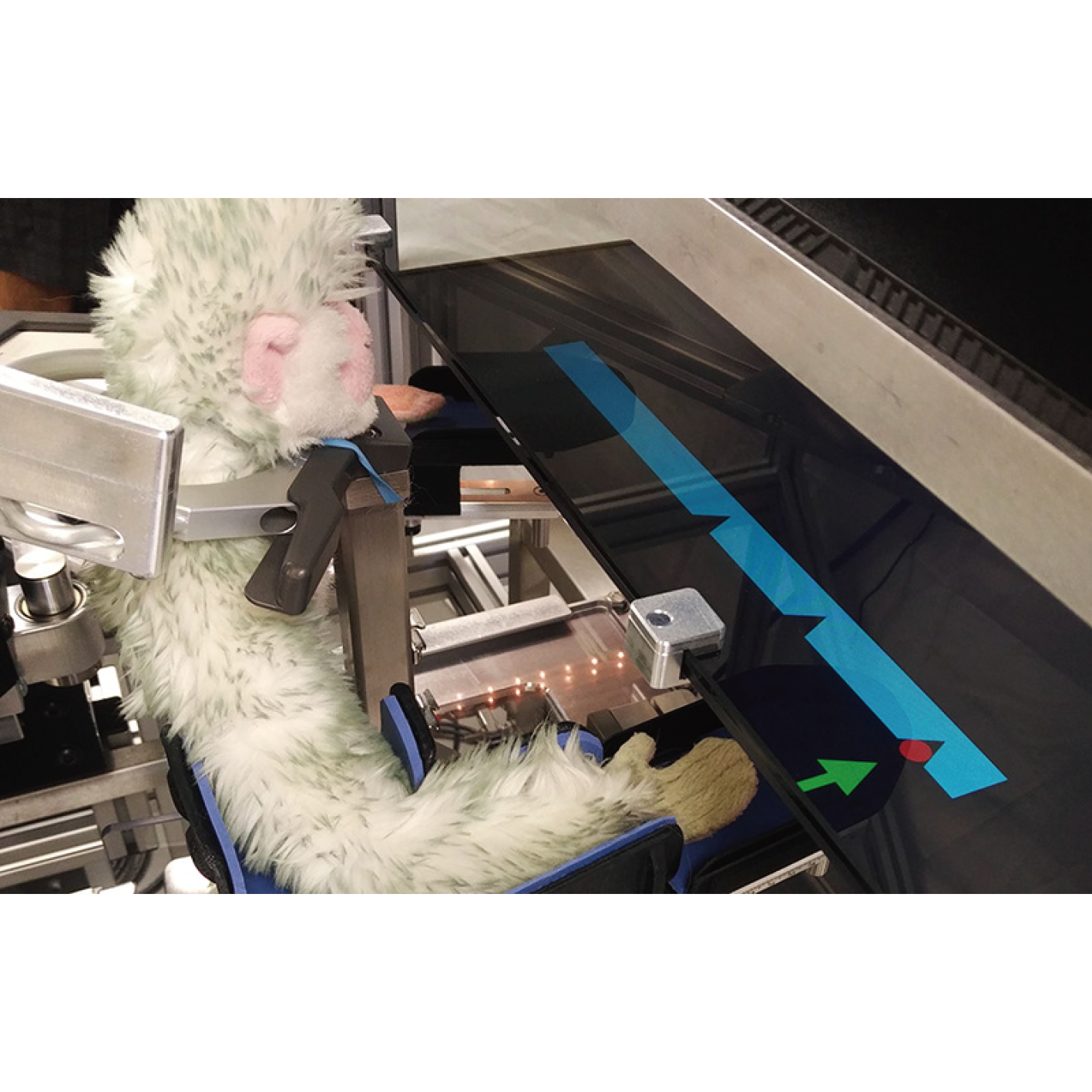
· 工作站和显示器,用于同步显示肢体运动2D 虚拟目标;
·“无扶手”NHP椅,可调节座椅、搁脚板、腹部搁脚板、靠背和臀部约束装置;
· 与其他系统的同步接口(模拟和数字输出);
· Dexterity-E数据采集和实验控制软件运行 Dexterity-E的计算机系统;
· Simulink@库,用于帮助快速创建自定义任务程序(MATLAB@和 Simulink@必须单独购买);
· 无限Dexterity-E ExplorerTM数据可视化下载。
2)核心性能
· 复杂的平台来监测和操作NHP外骨骼机器人;
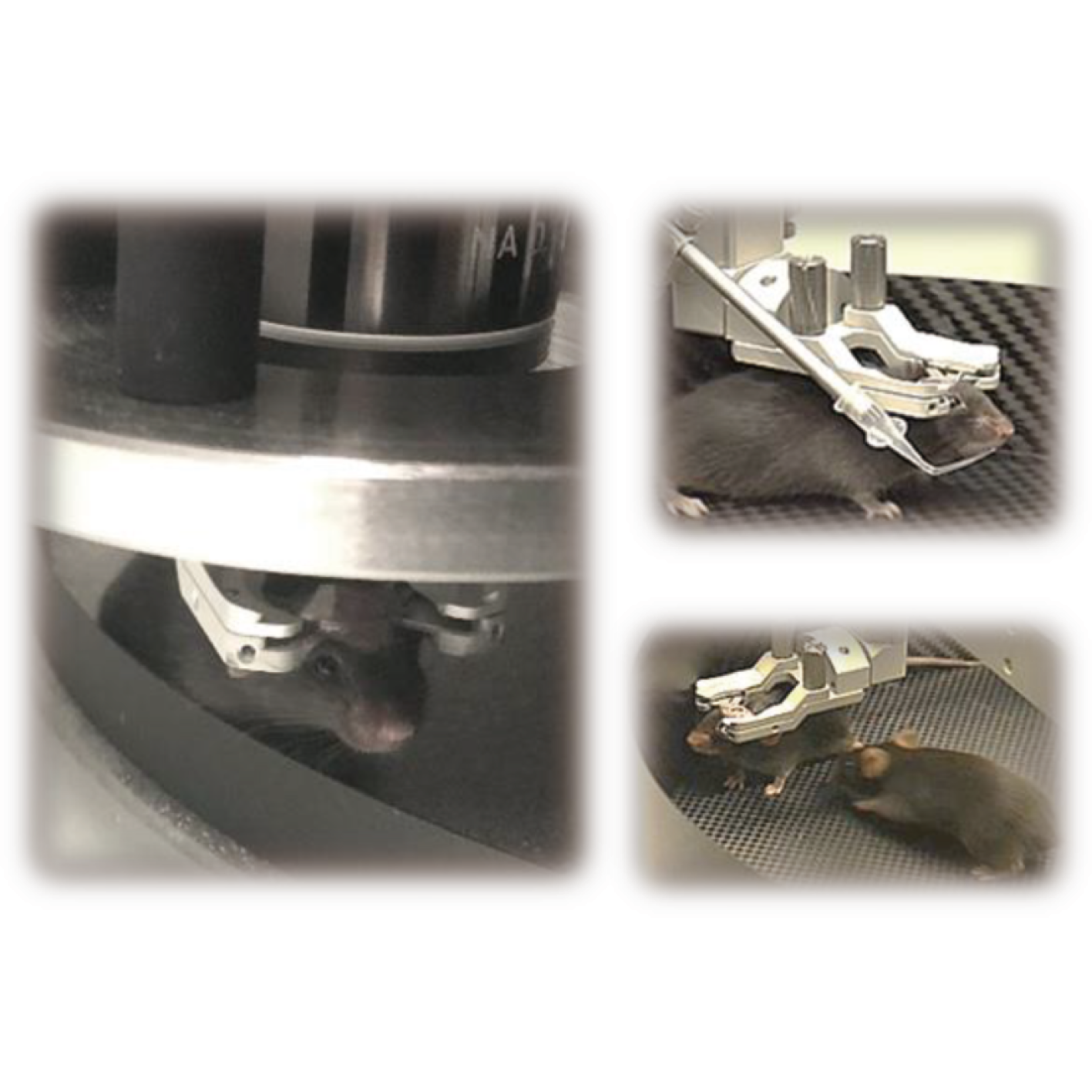
· 可实现双手和头部灵活控制;
· 2-D 机器人范式,保证了从实验室到临床研究的无缝转化;
·“无约束”椅,适合多应用场景。
完整的研究实验室
由神经科学家设计的NHP Kinarm 脑功能测评系统可以让你立即开始收集数据。
3)标准系统包括:
· 1/2动臂外骨骼手臂(s)的上肢
· 2D 虚拟/增强现实显示器
· Dexterit-ETM实验控制软件和硬件

· 一个或两个电动Kinarm外骨骼机器人手臂:用于右手或左手研究;
· 工作站和显示器,用于同步显示肢体运动2D 虚拟目标;
·“无扶手”NHP椅,可调节座椅、搁脚板、腹部搁脚板、靠背和臀部约束装置;
· 与其他系统的同步接口(模拟和数字输出);
· Dexterity-E数据采集和实验控制软件运行 Dexterity-E的计算机系统;
· Simulink@库,用于帮助快速创建自定义任务程序(MATLAB@和 Simulink@必须单独购买);
· 无限Dexterity-E ExplorerTM数据可视化下载。
2)核心性能
· 复杂的平台来监测和操作NHP外骨骼机器人;
· 可实现双手和头部灵活控制;
· 2-D 机器人范式,保证了从实验室到临床研究的无缝转化;
·“无约束”椅,适合多应用场景。
完整的研究实验室
由神经科学家设计的NHP Kinarm 脑功能测评系统可以让你立即开始收集数据。
3)标准系统包括:
· 1/2动臂外骨骼手臂(s)的上肢
· 2D 虚拟/增强现实显示器
· Dexterit-ETM实验控制软件和硬件